安川机器人在MotoSim EG-VRC软件中示教编程与仿真
发表时间:2019-12-02
一、机器人程序创建
1.“Controller”菜单下点击“Show”命令按钮,显示机器人虚拟示教器界面。

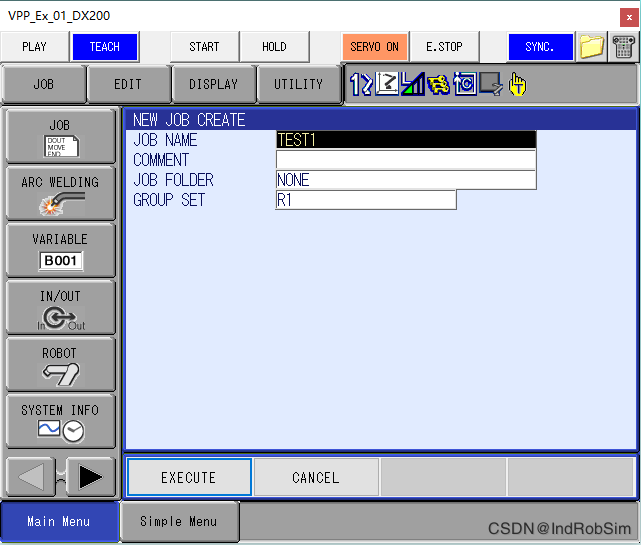
2.示教器界面左侧Main Menu菜单中依次点击“JOB”→“CREATE NEW JOB”,弹出的新建程序界面。

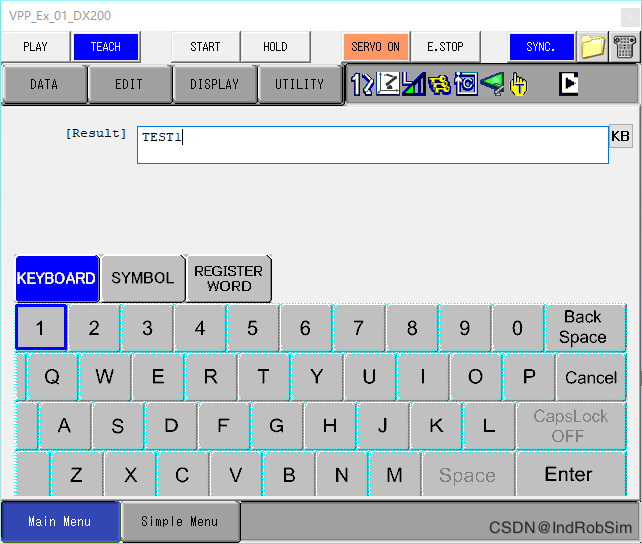
3.键盘上点击“空格”键,进入程序名称设置界面,输入程序名称(如TEST1),点击“Enter”键。
4.确定程序创建无误后,点击“EXECUTE”按钮,机器人程序创建完成。
二、机器人示教编程
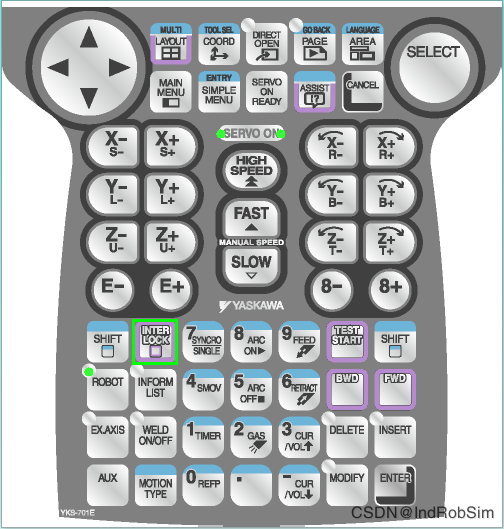
1.键盘上按“/”键或点击示教器界面上的“”按钮,打开机器人示教器的操作面板。
2.使用虚拟示教器的操作面板将机器人各个轴移动到合适角度。
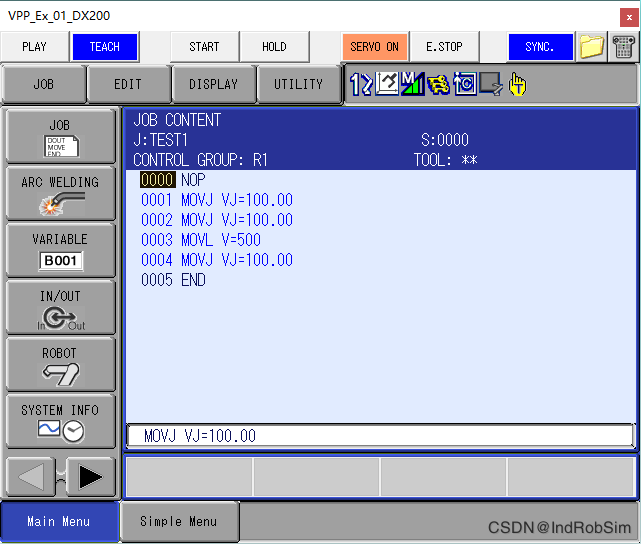
3.使用虚拟示教器的操作面板上的“MOTION TYPE”键,将机器人运动指令形式设定为MOVJ类型。
4.虚拟示教器的操作面板上点击“SELECT”按钮,示教器的光标移动到机器人运动指令上,使用方向键将光标移动到速度设定指令VJ上,然后使用“SHIFT+上方向”按钮,将速度是定为100。
5.速度设定完成后,点击“ENTER”按钮,添加机器人运动程序,示教机器人当前位置,作为机器人Home点。

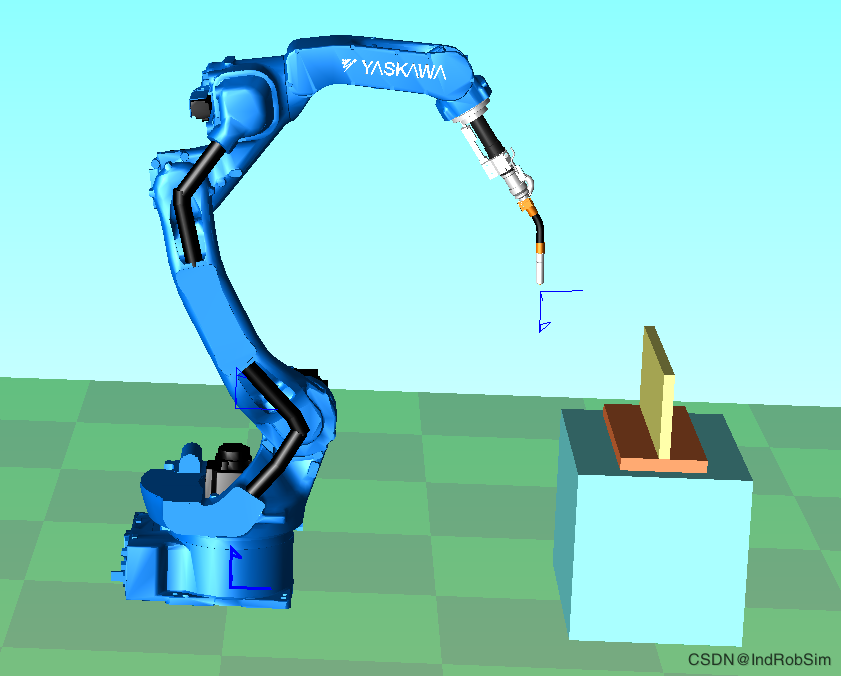
6.参考上述步骤,将机器人移动到工件的边缘位置,并调整好焊枪姿态,为机器人示教编程。
7.然后返回机器人Home点位置处,并示教Home点程序,示教好的程序如下图所示。
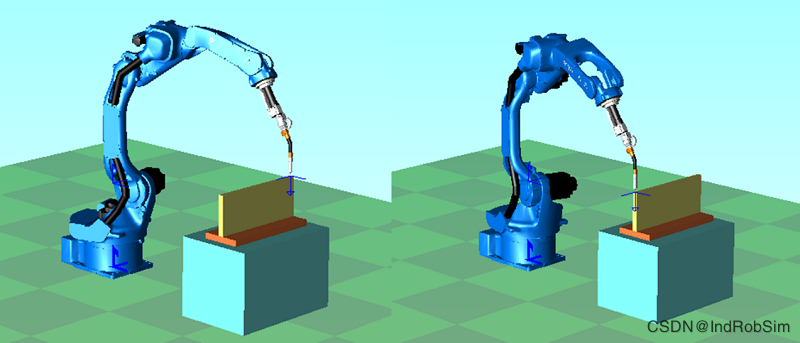
三、仿真运行
1.“Simulation”菜单下点击“Start”按钮,机器人开始按照示教的程序运行。

2.运行完成后,点击“Reset”按钮,机器人恢复原始位置。
1.“Controller”菜单下点击“Show”命令按钮,显示机器人虚拟示教器界面。
2.示教器界面左侧Main Menu菜单中依次点击“JOB”→“CREATE NEW JOB”,弹出的新建程序界面。
3.键盘上点击“空格”键,进入程序名称设置界面,输入程序名称(如TEST1),点击“Enter”键。
4.确定程序创建无误后,点击“EXECUTE”按钮,机器人程序创建完成。
二、机器人示教编程
1.键盘上按“/”键或点击示教器界面上的“”按钮,打开机器人示教器的操作面板。
2.使用虚拟示教器的操作面板将机器人各个轴移动到合适角度。
3.使用虚拟示教器的操作面板上的“MOTION TYPE”键,将机器人运动指令形式设定为MOVJ类型。
4.虚拟示教器的操作面板上点击“SELECT”按钮,示教器的光标移动到机器人运动指令上,使用方向键将光标移动到速度设定指令VJ上,然后使用“SHIFT+上方向”按钮,将速度是定为100。
5.速度设定完成后,点击“ENTER”按钮,添加机器人运动程序,示教机器人当前位置,作为机器人Home点。
6.参考上述步骤,将机器人移动到工件的边缘位置,并调整好焊枪姿态,为机器人示教编程。
7.然后返回机器人Home点位置处,并示教Home点程序,示教好的程序如下图所示。
三、仿真运行
1.“Simulation”菜单下点击“Start”按钮,机器人开始按照示教的程序运行。
2.运行完成后,点击“Reset”按钮,机器人恢复原始位置。
下一篇:安川机器人示教操作前安全步骤 上一篇:选择机械手臂的技巧

